Navigation
Skip to Content
Naval Postgraduate School
STUDENTS
FACULTY
STAFF
ALUMNI
myNPS
NPS.edu
CRUSER
Navigation
Welcome
About Us
Events
Monthly Meeting
Workshop
TechCon
Field Experimentation (FX)
STEM - Design Challenge
VRX Competition
Membership
Research
Current Funded Projects
Past Research Projects
Tech Talks
For Students
Resources
Student Travel
Robot Lending Library
JIFX
RoboDojo
Contact Us
STUDENTS
FACULTY
STAFF
ALUMNI
myNPS
NPS.edu
CRUSER Research - CRUSER
Nested Applications
Research_TechTalks_2-col
TechTalks
Dr. Peter Guest
Dr. Sean Kragelund
RoboDojo
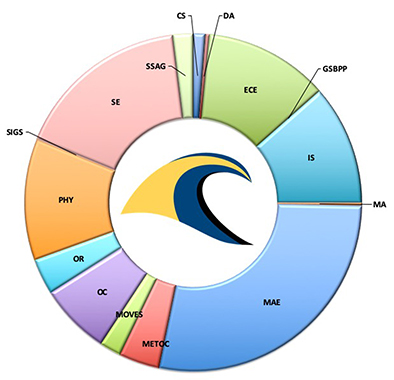
CRUSER Funding image