Welcome to CRUSER - CRUSER

Discovery Panel at the NIX IAS kickoff event.
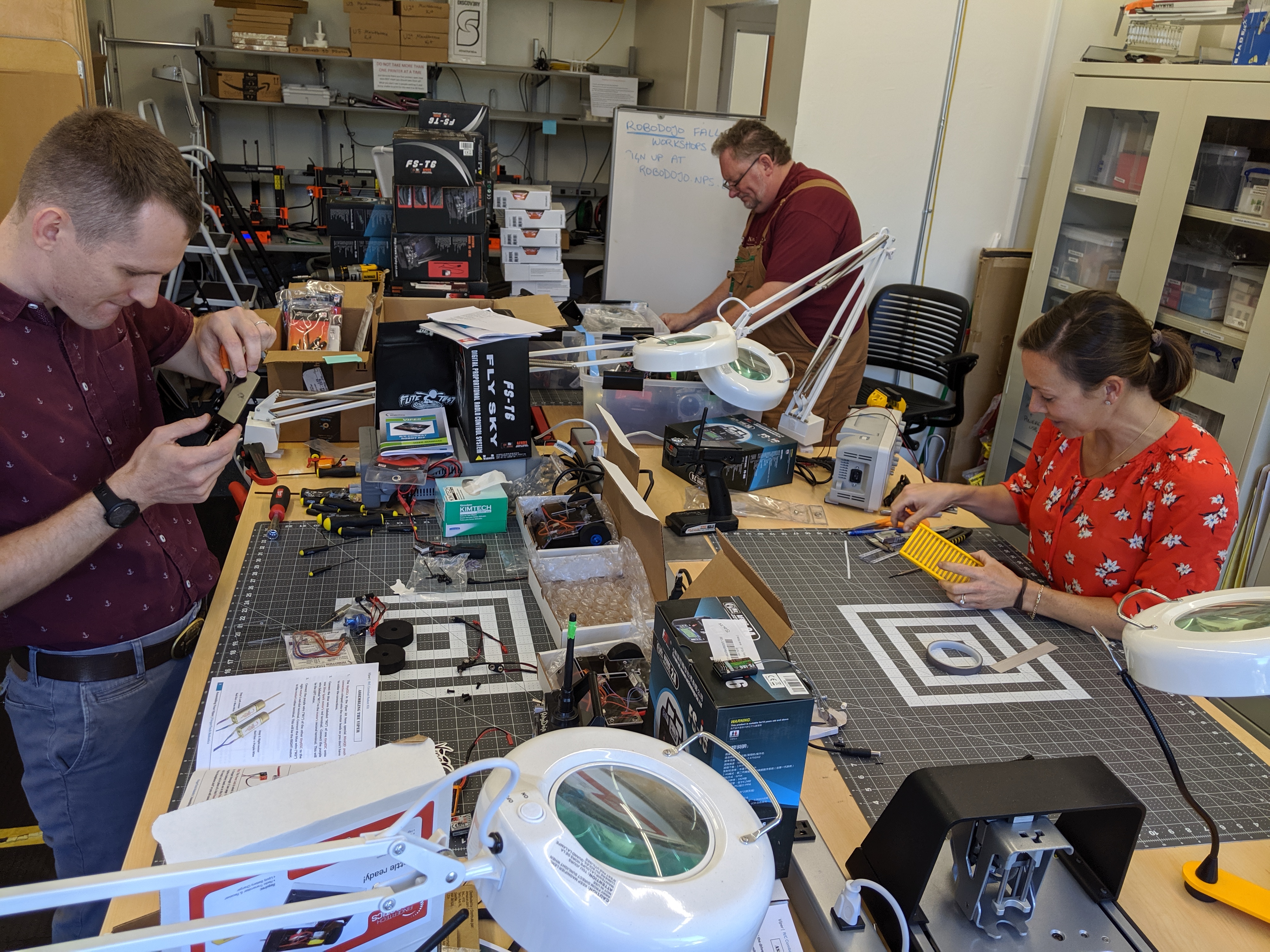
Students working with robot components and systems in the RoboDojo

Former CRUSER Deputy Director Dr. Timothy Chung sharing a unmanned ground vehicle with entralled children during the 2014 CRUSER research fair.

CAPT Jeff Hyink USN and two NPS students sponsored by CRSUER to represent NPS at "Fleet Week" on Crissy Field in San Franciso in October 2012.

Kids participate in the "build-your-own-ROV" activty run by an ONR reserve component during the 2015 CRUSER research fair.
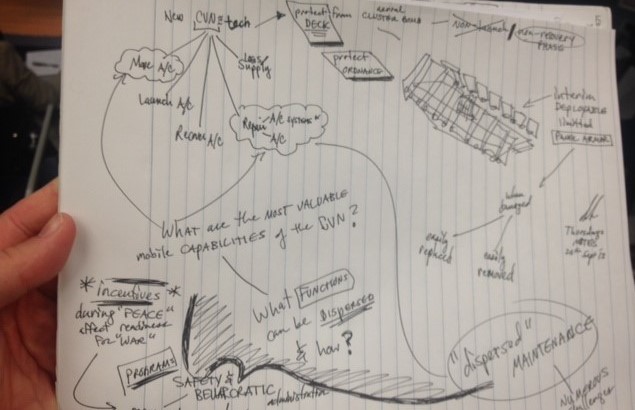
Warfare Innovation Continuum (WIC) Workshop concept generation work, September 2013.
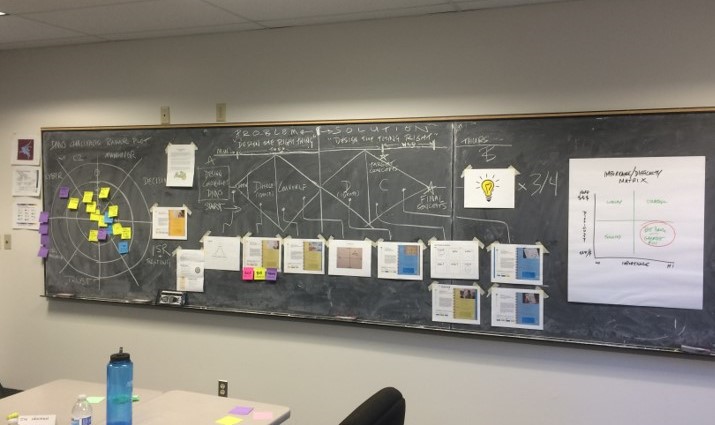
Warfare Innovation Continuum (WIC) Workshop concept generation work, "Cross Domain Operations" September 2017.

The CRUSER Team in 2018 from left to right Dr. Raymond Buettner, Col Todd Lyons USMC, LCDR Santhosh Shivishankar USN, Ms. Kerri Williams, Ms. Lyla Englehorn (banner) Ms. Kristen Tsolis, RDML Rick Williams USN (ret), CAPT Jeff Kline USN (ret), Dr. Carl Oros, Dr. Brian Bingham.