
SimPADS - Aerodynamic Decelerator Systems Laboratory
SimPADS Home
To date several different-weight precision aerial delivery systems (PADS) have been developed, tested and fielded. Developmental and operational testing of these systems involves tens and hundreds of airdrops to tune guidance, navigation and control (GNC) algorithms, and assure that system’s performance meets requirements. The touchdown accuracy performance of any PADS depends on many factors including parachute type and deployment conditions, unknown variable winds and drop zone terrain, quality of navigation solution and guidance/control strategy.
SimPADS is being developed to leverage the extensive tools suite developed by JM Technologies under the ORION program system (the original GPADS system developed for the U.S. Army in the late 1990’s) and make them more accessible using modern software tools and commercial off-the-shelf flight computer. It uses MATLAB as an underlying platform (Fig. A) and features open architecture software.
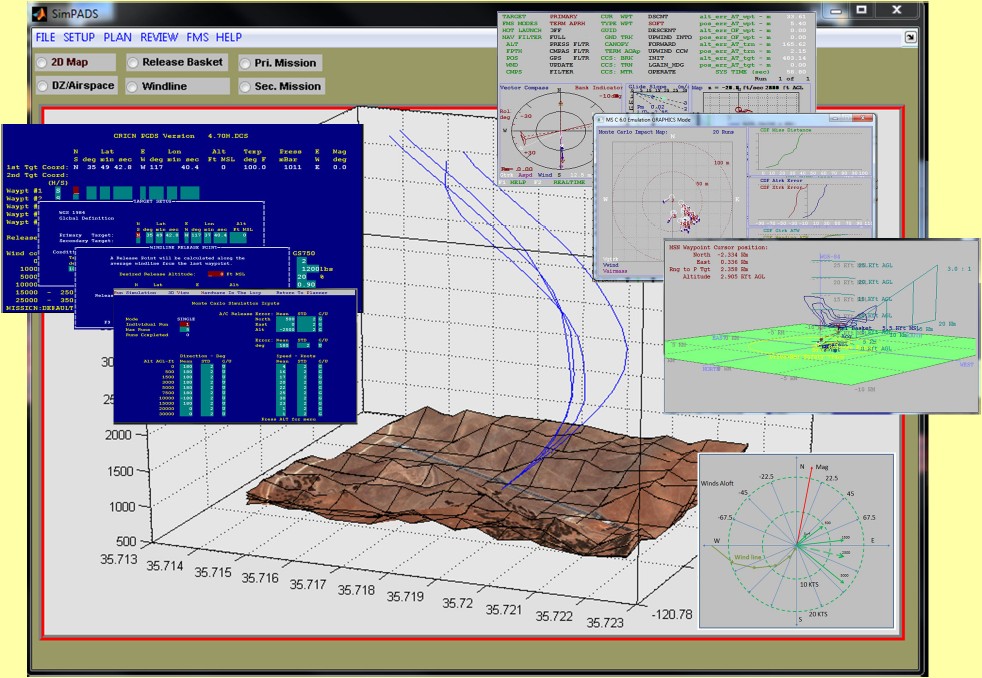
Figure A. SimPADS development environment mockup.
The primary effort involves the development of the application programing interfaces to allow integration of prototype GNC algorithms into the PADS flight computer to be able to exercise them in the SimPADS simulation environment, which includes:
- Sensor models (INS, GPS, pressure sensor, compass, etc.)
- Environment models (winds aloft, sensor errors, etc.)
- Canopy dynamics model
- PADS mission and release planner
- Flight telemetry download and playback
- Ground control software
The ultimate goal is to allow prototype GNC software algorithms to be developed without having to be concerned about the various embedded facilities that are required for a flightworthy system. The user will only need to recompile the same GNC algorithm files in the target flight computer compiler environment. This should be the only step required prior to being able to establish a new flight computer download.