
RPT - Aerodynamic Decelerator Systems Laboratory
Nested Applications
RPT Fig3

RPT - Fig4

Nested Applications
RPT - Fig1

RPT -Fig2

ADSC - RPT - Table
| Rascal 110 | Cub 50 | P10B | MATRICS | |
|---|---|---|---|---|
| Wing span, m | 2.8 | 5.74 | 6.48 | 12.65 |
| Length, m | 2 | 3.61 | 3.71 | 6.10 |
| Max speed, m/s (kn) | 30 (58) | 31 (61) | 40 (78) | 72 (140) |
| Cruise speed, m/s (kn) | 25 (49) | 25 (49) | 31 (61) | 51 (100) |
| Max gross takeoff weight, kg (lb) | 9 (20) | 60 (132) | 114 (241) | 670 (1477) |
| Payload capacity, kg (lb) | 4 (9) | 23 (50) | 39 (85) | 193 (425) |
| Endurance, hr | 2 | 1 | 2 | 10 |
The development of RPT included UAS modeling and integration with a Piccolo II autopilot. For each platform the modeling process started from describing aircraft geometry (Fig.B) and evaluating its inertial properties (Fig.C).
| a) | 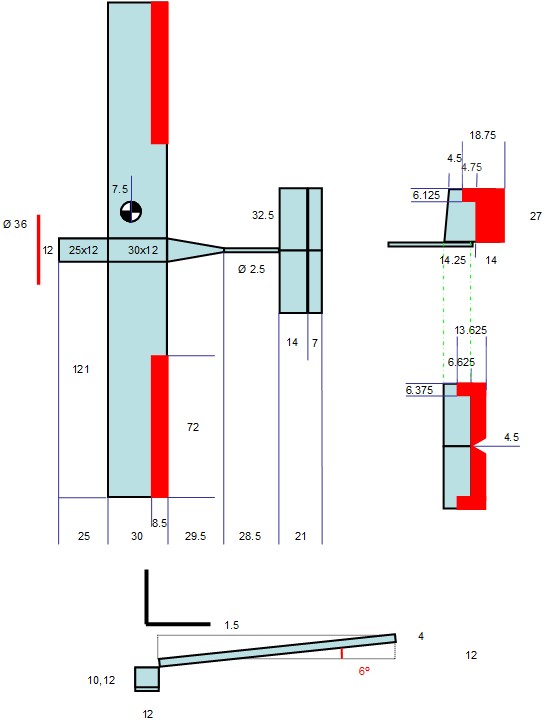 |
b) |  |
Figure B. Modeling geometry of P10B (a) and Cub-50 (b) UAS.
ADSC - RPT - Fig C
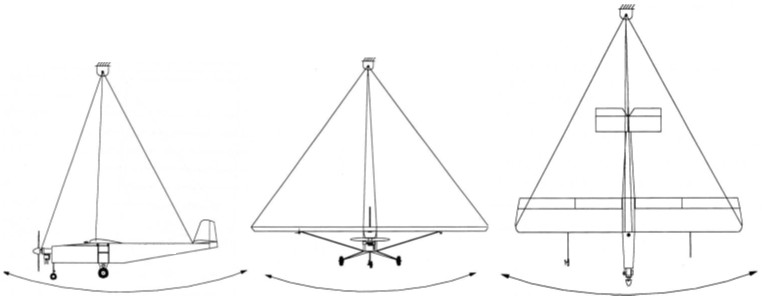
Figure C. Experimental determination of the moments of inertia.