Estimation and Identification Laboratory - Center for Control and Optimization
Estimation and Identification Laboratory
Estimation and Identification Laboratory
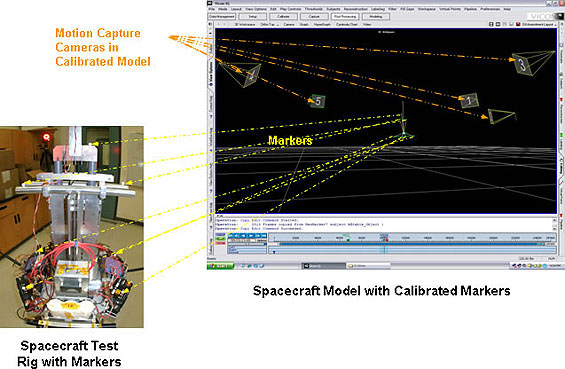
In this laboratory, unscented Kalman filtering is used for dual state-parameter estimation of various dynamical systems. The filter output can be any sensor measurement such as magnetometer or Motion Capture (MoCap) camera measurements.